- 作者/胡立德;譯者/羅亞琪
- 接續上篇《殺不死小強崩潰了嗎?原來踩爆蟑螂沒有想像中的簡單——《破解動物忍術》上》,在觀察到蟑螂逃生的特殊能力之後,可輾壓也能移動的機器人誕生了!
在前幾年,六足機器人的發展開始出現變革。研究人員對於可動的足式機器人一直都很感興趣,但使科學家的興趣達到巔峰的,是美國國防高等研究計劃署在 2000 年召集數名研究人員參與的特殊會議。
國防高等研究計劃署因資助月球探測而成為著名的政府機構,這些深具野心的探測計畫推動該領域的進展。那年,他們對具有跟昆蟲一樣行動能力的足式機器人產生興趣,高什克的指導教授鮑勃‧弗爾 (Bob Full) 以及密西根大學的電機工程學家丹尼爾‧科德舒克都在場。

六足機器人 RHex 圖/wikimedia
丹尼爾觀看了鮑勃有關蟑螂跋涉過困難地形的影片,因而受到啟發,建造了六足機器人 RHex,大小和體重跟 7 公斤的鬥牛犬差不多。它可以走過石頭、雜草和其他障礙物,全都是以開迴路的方式進行,也就是完全沒有接收周遭環境的回饋,即使沒有眼睛,也能奔跑而不跌倒。
堅硬與柔軟的結合
在 2009 年,微製程工業與機器人研究結合,建造了一系列的輕量級六足機器人。其中,「動態自主式爬行六足機器人」(Dynamic Autonomous Sprawled Hexapod,DASH) 是由一張厚紙板做成,僅 30 公克,可以放在手掌心。
這是由加利福尼亞大學柏克萊分校的電機工程學教授榮恩‧費林 (Ron Fearing) 的學生保羅‧柏克梅爾 (Paul Birkmeyer) 所設計的。柏克梅爾與費林使用了一種稱為「智慧複合微結構製造」(smart composite microstructures (SGM) manufacturing) 的技術,將堅硬的零件和柔軟的零件結合在一起,建造出一種複合型機器人。
- 首先,他們使用電腦畫出一份藍圖,將要切割的地方事先安排在一個平面上。
- 接著,他們使用雷射切割術在一張卡紙上進行切割,然後將紙對摺,並將一張具有彈性的聚酯薄片夾在中間,再使用黏著劑和加熱的方式讓卡紙和聚酯薄片永久黏附在一起。
- 最後他們用雷射刀在上面切出洞來,讓它變成可以像立體書一樣彎曲摺疊的平坦形狀。
- 最終完成的立體造型有六隻腳,只靠一個普通玩具遙控車會用的那種直流小馬達就能致動。
這個機器人每秒可移動自己的一個體長距離,相當於汽車以每小時 16 公里的速度前進,柔軟的外殼也讓這款機器人適於被重新設計成可輾壓的機器人。
DASH 有一個根本問題使它無法被輾壓——它只能被壓到馬達的高度,因為馬達必須是堅硬的。
那時,完全以柔軟的橡膠製成的馬達尚未被發明出來。高什克的創新之處在於他用兩個小一點的馬達來驅動機器人,馬達置於機器人的左右兩側,分別驅動該側的三隻腳。由於每個馬達只需要驅動三隻腳,而非六隻,因此可以比原本的馬達還要小。
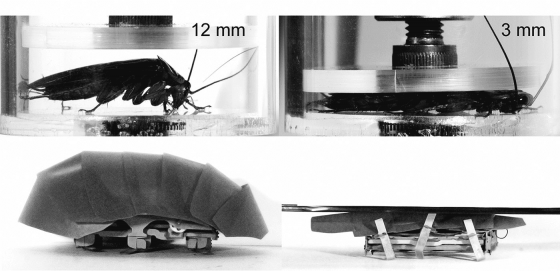
全名為「具關節機構之可壓縮機器人」(compressible robot with articulated mechanisms) 的仿生機器人 CRAM 及其自然之師美洲蟑螂。在被壓縮到原本高度的一半下,機器人仍可移動;而蟑螂則能在被壓縮到原本高度的 1/4 時仍保持運動能力。(圖片由高什克‧賈拉雅姆提供。)圖/三民提供
原版的 DASH 有一個方形底座,是用來固定六隻腳的地方。高什克在機器人的中間位置設計了一個斷裂區,讓機器人可以被往下壓,但又能回彈(如圖)。你可以把它想像成中間有彈簧連接的兩個底座,用手指把它往下壓時,機器人的兩半就會向外展開;把手放開時,機器人就會彈回來。
最後,高什克把一張聚酯薄片摺成可壓縮的外殼,就像摺紙帽那樣,然後將它覆蓋在機器人的上端。他用油來潤滑這個外殼,以減少它與隧道天花板間的摩擦力。
當機器人站立時,可以輕易走在堅硬的地面上。整個機器人只有巴掌大,僅 50 公克重,不過幾顆葡萄的重量。這是可以自主的機器人,電池和電子設備都裝在身上,它的主體是由層壓紙製成,所以可用手拿起、放下、甚至彎折扭曲。
接著,高什克把機器人放進只有它一半高的隧道中,就如他所設計好的, 機器人背部的中間位置可以彎曲,讓它被壓平。然而,彈簧的反作用力大力頂住天花板和地面,產生很大的摩擦力,使機器人動彈不得。機器人掙扎著想把自己往前推,但六隻小腳卻只是對地面又抓又刮,徒勞無功。
觀察蟑螂爬行,重新修正機器人
把馬達一分為二、讓體節可以變形的設計都發揮了成效, 但現在問題出在腳上,他必須重新設計腳的部分。
原來問題出在腳上!圖/GIPHY
目前,他把腳設計成火柴般的紙造腳,而機器人就靠這些腳走路,但當機器人被壓縮時,這些火柴腳會彎離主體,使腳無法獲得足夠的抓地力。同時,當機器人遭擠壓時,因頂住上下壁而多出來的摩擦力又會阻礙前進,也就是說,腳的姿勢已經很奇怪了,而天花板加壓在機器人身上的力又使得腳必須出更多力才行。
於是,高什克重新觀看蟑螂爬行的影片。蟑螂的腳就跟牠的腹部一樣,是可以折疊的。當蟑螂不受拘束自由奔跑時,腳尖會碰觸地面,然而,在隧道中,牠把腿往外張,就像在劈腿一樣,牠用膝蓋來推離地面,跟我們爬行時一樣。而當蟑螂一離開隧道,儲存在腿部的彈性位能便立刻把蟑螂推回站立的姿勢。
高什克領悟到,機器人的腳也必須設計成可折疊的,這樣無論是站立或壓縮的姿勢,腳都能緊抓住地。他把火柴折成一半,設計出 L 形的腳,接著把連接腳的關節設計得更有彈性。當站立時,機器人會用 L 形的其中一邊走路;當被壓縮時,腳則會向外攤開,使機器人還是可以用 L 形腳的另一邊走路。這個設計使得機器人的腳無論在什麼姿態下,都可以抓牢地面。
未來可壓折機器人,或許還能用在搜救行動中。圖/GIPHY
高什克的可壓折機器人或許可以應用在搜救行動。
地震過後,現場救難人員會希望評估瓦礫堆中是否仍有生還者,問題是瓦礫堆通常十分不穩定,人走在上面太危險了,這時若能派出大量像高什克設計的這類可壓折的小型機器人,裝配著感應器,就能穿梭在各個角落和裂縫來尋找生還者。高什克的機器人大部分是以廉價的材料製成,像是厚紙板和玩具馬達,因此,這種搜救機器人可以被當作消耗品使用,任務完成後毋須設法取回。
 ——本文摘自泛科學 2020 年 3 月選書《破解動物忍術:如何水上行走與飛簷走壁?動物運動與未來的機器人》,2020 年 1 月,三民出版。
——本文摘自泛科學 2020 年 3 月選書《破解動物忍術:如何水上行走與飛簷走壁?動物運動與未來的機器人》,2020 年 1 月,三民出版。
The post 小強求生術(下):人類有辦法打造跟蟑螂一樣「抗壓」的機器人嗎?——《破解動物忍術》 appeared first on PanSci 泛科學.